सैद्धांतिक यांत्रिकी- यह यांत्रिकी का एक खंड है, जो यांत्रिक गति और भौतिक निकायों के यांत्रिक संपर्क के बुनियादी नियमों को निर्धारित करता है।
सैद्धांतिक यांत्रिकी वह विज्ञान है जिसमें समय के साथ पिंडों की गति (यांत्रिक गति) का अध्ययन किया जाता है। यह यांत्रिकी की अन्य शाखाओं (लोच का सिद्धांत, सामग्री का प्रतिरोध, प्लास्टिसिटी का सिद्धांत, तंत्र और मशीनों का सिद्धांत, जल-वायुगतिकी) और कई तकनीकी विषयों के आधार के रूप में कार्य करता है।
यांत्रिक आंदोलन- यह भौतिक निकायों के स्थान में सापेक्ष स्थिति में समय के साथ परिवर्तन है।
यांत्रिक संपर्क- यह एक ऐसी बातचीत है जिसके परिणामस्वरूप यांत्रिक गति बदल जाती है या शरीर के अंगों की सापेक्ष स्थिति बदल जाती है।
कठोर शरीर स्टैटिक्स
स्थिति-विज्ञान- यह सैद्धांतिक यांत्रिकी का एक खंड है, जो कठोर निकायों के संतुलन की समस्याओं और इसके समकक्ष बलों की एक प्रणाली के दूसरे में परिवर्तन से संबंधित है।
- स्टैटिक्स की मूल अवधारणाएँ और नियम
- बिल्कुल ठोस(ठोस, पिंड) एक भौतिक पिंड है, किसी भी बिंदु के बीच की दूरी जिसमें परिवर्तन नहीं होता है।
- सामग्री बिंदुएक शरीर है जिसका आयाम, समस्या की स्थितियों के अनुसार, उपेक्षित किया जा सकता है।
- मुक्त निकायएक निकाय है, जिसकी आवाजाही पर कोई प्रतिबंध नहीं है।
- मुक्त (बाध्य) शरीरएक निकाय है जिसके आंदोलन पर प्रतिबंध लगाया गया है।
- सम्बन्ध- ये वे निकाय हैं जो विचाराधीन वस्तु (शरीर या निकायों की प्रणाली) की गति को रोकते हैं।
- संचार प्रतिक्रियाएक बल है जो एक कठोर शरीर पर एक बंधन के प्रभाव की विशेषता है। यदि हम उस बल पर विचार करें जिसके साथ एक कठोर शरीर एक क्रिया के रूप में एक बंधन पर कार्य करता है, तो बंधन प्रतिक्रिया एक प्रतिक्रिया है। इस मामले में, बल - क्रिया बंधन पर लागू होती है, और बंधन प्रतिक्रिया ठोस पर लागू होती है।
- यांत्रिक प्रणालीपरस्पर जुड़े निकायों या भौतिक बिंदुओं का एक समूह है।
- ठोसएक यांत्रिक प्रणाली के रूप में माना जा सकता है, जिसके बिंदुओं के बीच की स्थिति और दूरी नहीं बदलती है।
- शक्तिएक वेक्टर मात्रा है जो एक भौतिक शरीर की दूसरे पर यांत्रिक क्रिया की विशेषता है।
एक वेक्टर के रूप में बल को आवेदन के बिंदु, क्रिया की दिशा और निरपेक्ष मूल्य की विशेषता है। बल मापांक की माप की इकाई न्यूटन है। - फोर्स एक्शन लाइनएक सीधी रेखा है जिसके साथ बल वेक्टर निर्देशित होता है।
- केंद्रित शक्ति- एक बिंदु पर लगाया गया बल।
- वितरित बल (वितरित भार)- ये शरीर के आयतन, सतह या लंबाई के सभी बिंदुओं पर कार्य करने वाले बल हैं।
वितरित भार मात्रा (सतह, लंबाई) की एक इकाई पर कार्य करने वाले बल द्वारा निर्धारित किया जाता है।
वितरित भार का आयाम एन / एम 3 (एन / एम 2, एन / एम) है। - बाहरी बलएक शरीर से कार्य करने वाला बल है जो माना यांत्रिक प्रणाली से संबंधित नहीं है।
- अंदरूनी शक्तिविचाराधीन प्रणाली से संबंधित किसी अन्य भौतिक बिंदु से यांत्रिक प्रणाली के भौतिक बिंदु पर कार्य करने वाला बल है।
- बल प्रणालीएक यांत्रिक प्रणाली पर कार्य करने वाले बलों का एक समूह है।
- बलों की सपाट प्रणालीबलों की एक प्रणाली है, जिसकी क्रिया की रेखाएं एक ही विमान में होती हैं।
- बलों की स्थानिक प्रणालीबलों की एक प्रणाली है, जिसकी क्रिया की रेखाएं एक ही विमान में नहीं होती हैं।
- बलों को परिवर्तित करने की प्रणालीबलों की एक प्रणाली है जिसकी क्रिया रेखाएं एक बिंदु पर प्रतिच्छेद करती हैं।
- बलों की मनमानी प्रणालीबलों की एक प्रणाली है, जिसकी क्रिया रेखाएं एक बिंदु पर प्रतिच्छेद नहीं करती हैं।
- बलों की समतुल्य प्रणाली- ये बलों की प्रणालियां हैं, जिनके प्रतिस्थापन से शरीर की यांत्रिक स्थिति में कोई बदलाव नहीं आता है।
स्वीकृत पद :. - संतुलन- यह एक ऐसी अवस्था है जिसमें बलों की कार्रवाई के तहत शरीर स्थिर रहता है या एक समान रूप से एक सीधी रेखा में चलता है।
- बलों की संतुलित प्रणालीबलों की एक प्रणाली है, जो एक मुक्त ठोस पर लागू होने पर, अपनी यांत्रिक स्थिति को नहीं बदलती है (असंतुलन नहीं करती है)।
 .
. - पारिणामिक शक्तिएक बल है, जिसकी क्रिया शरीर पर बलों की प्रणाली की कार्रवाई के बराबर होती है।
 .
. - शक्ति का क्षणएक मान है जो किसी बल की घूर्णन क्षमता को दर्शाता है।
- बलों की एक जोड़ीदो समानांतर, परिमाण में समान, विपरीत दिशा में निर्देशित बलों की एक प्रणाली है।
स्वीकृत पद :.
बलों की एक जोड़ी की कार्रवाई के तहत, शरीर घूमेगा। - अक्ष बल प्रक्षेपणइस अक्ष पर बल सदिश के आरंभ और अंत से खींचे गए लंबों के बीच एक खंड संलग्न है।
प्रक्षेपण सकारात्मक है यदि रेखा खंड की दिशा अक्ष की सकारात्मक दिशा के साथ मेल खाती है। - विमान पर बल प्रक्षेपणएक विमान पर एक वेक्टर है, जो इस विमान पर बल वेक्टर की शुरुआत और अंत से खींचे गए लंबवत के बीच संलग्न है।
- कानून 1 (जड़ता का कानून)।एक पृथक सामग्री बिंदु आराम पर है या समान रूप से और सीधा चलता है।
एक भौतिक बिंदु की एकसमान और सीधा गति जड़त्व द्वारा गति है। एक भौतिक बिंदु और एक कठोर शरीर के बीच संतुलन की स्थिति को न केवल आराम की स्थिति के रूप में समझा जाता है, बल्कि जड़ता द्वारा गति के रूप में भी समझा जाता है। एक कठोर शरीर के लिए, विभिन्न प्रकार की जड़त्वीय गति होती है, उदाहरण के लिए, एक निश्चित अक्ष के चारों ओर एक कठोर शरीर का एक समान घूमना। - कानून 2.एक ठोस पिंड दो बलों की कार्रवाई के तहत संतुलन में तभी होता है जब ये बल परिमाण में समान हों और कार्रवाई की सामान्य रेखा के साथ विपरीत दिशाओं में निर्देशित हों।
इन दो बलों को संतुलन बल कहा जाता है।
सामान्य तौर पर, बलों को संतुलन कहा जाता है यदि कठोर शरीर जिस पर इन बलों को लगाया जाता है वह आराम पर होता है। - कानून 3.एक कठोर शरीर की स्थिति (यहां "राज्य" शब्द का अर्थ गति या आराम की स्थिति) को परेशान किए बिना, कोई भी संतुलन बलों को जोड़ और छोड़ सकता है।
परिणाम। एक कठोर शरीर की स्थिति का उल्लंघन किए बिना, बल को शरीर के किसी भी बिंदु पर अपनी क्रिया की रेखा के साथ स्थानांतरित किया जा सकता है।
बलों की दो प्रणालियों को समतुल्य कहा जाता है यदि उनमें से एक को कठोर शरीर की स्थिति का उल्लंघन किए बिना दूसरे द्वारा प्रतिस्थापित किया जा सकता है। - कानून 4.एक बिंदु पर लगाए गए दो बलों का परिणाम, एक ही बिंदु पर लगाया जाता है, इन बलों पर बने समांतर चतुर्भुज के विकर्ण के परिमाण के बराबर होता है, और इसके साथ निर्देशित होता है
विकर्ण।
परिणामी का मापांक बराबर है: - कानून 5 (कार्रवाई और प्रतिक्रिया की समानता का कानून)... वे बल जिनके साथ दो पिंड एक दूसरे पर कार्य करते हैं, परिमाण में समान होते हैं और एक सीधी रेखा के साथ विपरीत दिशाओं में निर्देशित होते हैं।
यह ध्यान में रखा जाना चाहिए कि कार्य- शरीर पर लागू बल बी, तथा प्रतिरोध- शरीर पर लागू बल एसंतुलित नहीं हैं, क्योंकि वे विभिन्न निकायों से जुड़े हुए हैं। - नियम 6 (सख्त करने का नियम)... एक गैर-ठोस शरीर का संतुलन तब नहीं बिगड़ता जब वह जम जाता है।
यह नहीं भूलना चाहिए कि संतुलन की शर्तें, जो एक ठोस के लिए आवश्यक और पर्याप्त हैं, आवश्यक हैं, लेकिन संबंधित गैर-ठोस के लिए पर्याप्त नहीं हैं। - कानून 7 (संबंधों से मुक्ति का कानून)।एक गैर-मुक्त कठोर शरीर को मुक्त माना जा सकता है यदि यह बंधनों की संबंधित प्रतिक्रियाओं के साथ बंधनों की क्रिया को बदलकर मानसिक रूप से बंधनों से मुक्त हो।
- कनेक्शन और उनकी प्रतिक्रियाएं
- सौम्य सतहसमर्थन सतह के लिए सामान्य के साथ गति को बाधित करता है। प्रतिक्रिया सतह के लंबवत निर्देशित होती है।
- जोड़ा हुआ चल समर्थनसंदर्भ विमान के लिए सामान्य के साथ शरीर की गति को रोकता है। प्रतिक्रिया को सामान्य के साथ समर्थन सतह पर निर्देशित किया जाता है।
- जोड़ा हुआ निश्चित समर्थनरोटेशन की धुरी के लंबवत समतल में किसी भी गति का प्रतिकार करता है।
- जोड़ा हुआ भारहीन छड़बार की रेखा के साथ शरीर की गति का प्रतिकार करता है। प्रतिक्रिया को बार की रेखा के साथ निर्देशित किया जाएगा।
- अंधा समाप्तिविमान में किसी भी गति और रोटेशन का प्रतिकार करता है। इसकी क्रिया को दो घटकों के रूप में प्रतिनिधित्व किए गए बल और एक पल के साथ बलों की एक जोड़ी द्वारा प्रतिस्थापित किया जा सकता है।




गतिकी
गतिकी- सैद्धांतिक यांत्रिकी का एक खंड, जो अंतरिक्ष और समय में होने वाली प्रक्रिया के रूप में यांत्रिक गति के सामान्य ज्यामितीय गुणों की जांच करता है। चलती वस्तुओं को ज्यामितीय बिंदु या ज्यामितीय निकाय माना जाता है।
- किनेमेटिक्स की बुनियादी अवधारणाएं
- एक बिंदु (शरीर) की गति का नियमसमय पर अंतरिक्ष में एक बिंदु (शरीर) की स्थिति की निर्भरता है।
- बिंदु प्रक्षेपवक्रअपने आंदोलन के दौरान अंतरिक्ष में एक बिंदु की ज्यामितीय स्थिति है।
- बिंदु (शरीर) गति- यह अंतरिक्ष में एक बिंदु (शरीर) की स्थिति के समय में परिवर्तन की विशेषता है।
- बिंदु (शरीर) त्वरण- यह एक बिंदु (शरीर) की गति के समय में परिवर्तन की विशेषता है।
- एक बिंदु की गतिज विशेषताओं का निर्धारण
- बिंदु प्रक्षेपवक्र
संदर्भ के वेक्टर फ्रेम में, प्रक्षेपवक्र को अभिव्यक्ति द्वारा वर्णित किया गया है:।
संदर्भ की समन्वय प्रणाली में, एक बिंदु की गति के नियम के अनुसार प्रक्षेपवक्र निर्धारित किया जाता है और अभिव्यक्तियों द्वारा वर्णित किया जाता है जेड = एफ (एक्स, वाई)- अंतरिक्ष में, या वाई = एफ (एक्स)- प्लेन में।
संदर्भ के प्राकृतिक फ्रेम में, प्रक्षेपवक्र अग्रिम रूप से निर्धारित किया जाता है। - एक वेक्टर समन्वय प्रणाली में एक बिंदु की गति का निर्धारण
एक वेक्टर समन्वय प्रणाली में एक बिंदु के आंदोलन को निर्दिष्ट करते समय, समय अंतराल के आंदोलन के अनुपात को इस समय अंतराल में गति का औसत मूल्य कहा जाता है:।
समय अंतराल को असीम रूप से छोटा मानते हुए, वेग मान प्राप्त किया जाता है इस पलसमय (गति का तात्कालिक मूल्य): .
.
औसत वेग वेक्टर वेक्टर के साथ बिंदु की गति की दिशा में निर्देशित होता है, वेक्टर तत्काल गतिबिंदु के आंदोलन की दिशा में प्रक्षेपवक्र के लिए स्पर्शरेखा से निर्देशित।
निष्कर्ष: एक बिंदु की गति समय के संबंध में गति के नियम के व्युत्पन्न के बराबर एक सदिश राशि है।
व्युत्पन्न संपत्ति: समय के संबंध में किसी भी मात्रा का व्युत्पन्न इस मात्रा के परिवर्तन की दर निर्धारित करता है। - एक समन्वय प्रणाली में एक बिंदु की गति का निर्धारण
बिंदु निर्देशांक परिवर्तन दर: .
.
एक आयताकार निर्देशांक प्रणाली के साथ एक बिंदु की पूर्ण गति का मापांक बराबर होगा: .
.
वेग वेक्टर की दिशा दिशा कोणों के कोसाइन द्वारा निर्धारित की जाती है: ,
,
वेग वेक्टर और निर्देशांक अक्षों के बीच के कोण कहाँ हैं। - संदर्भ के प्राकृतिक फ्रेम में एक बिंदु की गति का निर्धारण
संदर्भ के प्राकृतिक फ्रेम में एक बिंदु की गति एक बिंदु की गति के नियम के व्युत्पन्न के रूप में निर्धारित की जाती है:।
पिछले निष्कर्षों के अनुसार, वेग वेक्टर को बिंदु की गति की दिशा में प्रक्षेपवक्र के लिए स्पर्शरेखा रूप से निर्देशित किया जाता है और कुल्हाड़ियों में केवल एक प्रक्षेपण द्वारा निर्धारित किया जाता है।
- कठोर शरीर कीनेमेटीक्स
- ठोस पदार्थों की गतिकी में, दो मुख्य कार्य हल होते हैं:
1) आंदोलन का कार्य और समग्र रूप से शरीर की गतिज विशेषताओं का निर्धारण;
2) शरीर के बिंदुओं की गतिज विशेषताओं का निर्धारण। - एक कठोर शरीर की अनुवादकीय गति
ट्रांसलेशनल मूवमेंट एक ऐसी गति है जिसमें शरीर के दो बिंदुओं के माध्यम से खींची गई एक सीधी रेखा अपनी मूल स्थिति के समानांतर रहती है।
प्रमेय: स्थानान्तरण गति के दौरान, शरीर के सभी बिंदु एक ही प्रक्षेपवक्र के साथ चलते हैं और समय के प्रत्येक क्षण में परिमाण और दिशा में समान वेग और त्वरण होता है.
निष्कर्ष: एक कठोर पिंड का स्थानान्तरण आंदोलन उसके किसी भी बिंदु की गति से निर्धारित होता है, और इसलिए, इसके आंदोलन का कार्य और अध्ययन बिंदु के गतिज विज्ञान तक कम हो जाता है. - एक निश्चित अक्ष के चारों ओर एक कठोर शरीर की घूर्णी गति
एक निश्चित अक्ष के चारों ओर एक कठोर शरीर की घूर्णी गति एक कठोर शरीर की गति है जिसमें शरीर से संबंधित दो बिंदु गति के पूरे समय में गतिहीन रहते हैं।
शरीर की स्थिति रोटेशन के कोण से निर्धारित होती है। कोण इकाई रेडियन है। (रेडियन - केंद्र का कोनाएक वृत्त जिसकी चाप की लंबाई त्रिज्या के बराबर है, वृत्त के कुल कोण में शामिल है 2πरेडियन।)
एक निश्चित अक्ष के चारों ओर किसी पिंड की घूर्णी गति का नियम।
शरीर का कोणीय वेग और कोणीय त्वरण विभेदन विधि द्वारा निर्धारित किया जाता है:
- कोणीय वेग, रेड / एस;
- कोणीय त्वरण, रेड / s²।
यदि आप शरीर को अक्ष के लंबवत समतल से काटते हैं, तो रोटेशन के अक्ष पर बिंदु का चयन करें साथऔर एक मनमाना बिंदु एमफिर बिंदु एमबिंदु के आसपास वर्णन करेंगे साथवृत्त त्रिज्या आर... दौरान डीटीएक कोण के माध्यम से एक प्रारंभिक घूर्णन होता है, जबकि बिंदु एमकुछ दूरी पर प्रक्षेपवक्र के साथ आगे बढ़ेंगे .
.
रैखिक गति मॉड्यूल: .
.
बिंदु त्वरण एमएक ज्ञात प्रक्षेपवक्र के साथ, यह इसके घटकों द्वारा निर्धारित किया जाता है: ,
,
कहाँ पे .
.
परिणामस्वरूप, हमें सूत्र मिलते हैं
स्पर्शरेखा त्वरण: ;
;
सामान्य त्वरण: .
.

गतिकी
गतिकीसैद्धांतिक यांत्रिकी का एक खंड है जिसमें वे अध्ययन करते हैं यांत्रिक गतिभौतिक शरीर, उन कारणों के आधार पर जो उन्हें पैदा करते हैं।
- गतिकी की बुनियादी अवधारणाएँ
- जड़ता- जब तक बाहरी ताकतें इस अवस्था को नहीं बदल देतीं, तब तक यह भौतिक निकायों की आराम की स्थिति या एकसमान रेक्टिलाइनियर गति बनाए रखने की संपत्ति है।
- वज़नशरीर की जड़ता का एक मात्रात्मक माप है। द्रव्यमान के लिए माप की इकाई किलोग्राम (किलो) है।
- सामग्री बिंदुएक द्रव्यमान वाला शरीर है, जिसके आयामों को इस समस्या को हल करते समय उपेक्षित किया जाता है।
- यांत्रिक प्रणाली के गुरुत्वाकर्षण का केंद्र- ज्यामितीय बिंदु, जिसके निर्देशांक सूत्रों द्वारा निर्धारित किए जाते हैं:
कहाँ पे एम के, एक्स के, वाई के, जेड के- द्रव्यमान और निर्देशांक कयांत्रिक प्रणाली का -वां बिंदु, एमप्रणाली का द्रव्यमान है।
एक सजातीय गुरुत्वाकर्षण क्षेत्र में, द्रव्यमान के केंद्र की स्थिति गुरुत्वाकर्षण के केंद्र की स्थिति से मेल खाती है। - धुरी के बारे में एक भौतिक शरीर की जड़ता का क्षणघूर्णी जड़ता का एक मात्रात्मक माप है।
अक्ष के बारे में एक भौतिक बिंदु की जड़ता का क्षण बिंदु के द्रव्यमान के गुणनफल के बराबर होता है, जो अक्ष से बिंदु की दूरी के वर्ग के बराबर होता है: .
.
अक्ष के बारे में प्रणाली (शरीर) की जड़ता का क्षण सभी बिंदुओं की जड़ता के क्षणों के अंकगणितीय योग के बराबर है:
- एक भौतिक बिंदु की जड़ता का बलएक वेक्टर मात्रा त्वरण मापांक द्वारा बिंदु द्रव्यमान के गुणनफल के बराबर होती है और त्वरण वेक्टर के विपरीत निर्देशित होती है:
- एक भौतिक शरीर की जड़ता का बलएक वेक्टर मात्रा शरीर के द्रव्यमान के केंद्र के त्वरण के मापांक द्वारा शरीर द्रव्यमान के उत्पाद के बराबर होती है और द्रव्यमान के केंद्र के त्वरण के वेक्टर के विपरीत निर्देशित होती है :,
शरीर के द्रव्यमान के केंद्र का त्वरण कहाँ है। - प्राथमिक बल आवेगक्या एक सदिश राशि अनंत रूप से छोटे समय अंतराल द्वारा बल वेक्टर के गुणनफल के बराबर है डीटी:
.
t के लिए बल का कुल आवेग प्राथमिक आवेगों के समाकलन के बराबर है: .
. - ताकत का प्राथमिक कार्यएक अदिश है डीएअदिश लाभ के बराबर
गतिकी
सामग्री बिंदु कीनेमेटीक्स
गति के दिए गए समीकरणों के अनुसार किसी बिंदु की गति और त्वरण का निर्धारण
दिया गया है: एक बिंदु की गति के समीकरण: x = 12 पाप (πt / 6), सेमी; वाई = 6 कॉस 2 (πt / 6), सेमी।
इसके प्रक्षेपवक्र का प्रकार निर्धारित करें और समय के लिए t = 1 sप्रक्षेपवक्र पर एक बिंदु की स्थिति, उसकी गति, कुल, स्पर्शरेखा और सामान्य त्वरण, साथ ही प्रक्षेपवक्र की वक्रता की त्रिज्या का पता लगाएं।
एक कठोर पिंड की अनुवादकीय और घूर्णी गति

दिया गया:
टी = 2 एस; आर 1 = 2 सेमी, आर 1 = 4 सेमी; आर 2 = 6 सेमी, आर 2 = 8 सेमी; आर 3 = 12 सेमी, आर 3 = 16 सेमी; एस 5 = टी 3 - 6 टी (सेमी)।
समय t = 2 पर बिंदुओं A, C की गति निर्धारित करें; पहिया 3 का कोणीय त्वरण; बिंदु बी त्वरण और कर्मचारी त्वरण 4.
एक समतल तंत्र का गतिज विश्लेषण

दिया गया:
आर 1, आर 2, एल, एबी, 1।
खोजें: 2.

फ्लैट तंत्र में छड़ 1, 2, 3, 4 और स्लाइड ई होते हैं। छड़ें बेलनाकार टिका के माध्यम से जुड़ी होती हैं। बिंदु D बार AB के मध्य में स्थित है।
दिया गया: 1, 1.
खोजें: गति वी ए, वी बी, वी डी और वी ई; कोणीय वेग 2, 3 और ω 4; त्वरण ए बी; कोणीय त्वरण AB लिंक AB; तंत्र के लिंक 2 और 3 के गति P 2 और P 3 के तत्काल केंद्रों की स्थिति।
एक बिंदु की निरपेक्ष गति और निरपेक्ष त्वरण का निर्धारण

आयताकार प्लेट नियम के अनुसार एक निश्चित अक्ष के चारों ओर घूमती है = 6 टी 2 - 3 टी 3... कोण की धनात्मक दिशा को एक चाप तीर के साथ आकृतियों में दिखाया गया है। रोटेशन अक्ष OO 1 प्लेट के तल में स्थित है (प्लेट अंतरिक्ष में घूमती है)।
बिंदु M प्लेट पर रेखा BD के अनुदिश गति करता है। इसकी सापेक्ष गति का नियम दिया गया है, अर्थात् निर्भरता s = AM = 40 (टी - 2 टी 3) - 40(एस - सेंटीमीटर में, टी - सेकंड में)। दूरी बी = 20 सेमी... आकृति में, बिंदु M को उस स्थिति में दिखाया गया है जिस पर s = AM > 0 (एस के लिए< 0 बिंदु M, बिंदु A के दूसरी ओर है)।
समय t . पर बिंदु M की निरपेक्ष गति और निरपेक्ष त्वरण ज्ञात कीजिए 1 = 1 s.
गतिकी
चर बलों की कार्रवाई के तहत एक भौतिक बिंदु की गति के अंतर समीकरणों का एकीकरण
द्रव्यमान m का एक भार D, बिंदु A पर प्रारंभिक वेग V 0 प्राप्त करने के बाद, एक ऊर्ध्वाधर विमान में स्थित एक घुमावदार पाइप ABC में चलता है। खंड AB पर, जिसकी लंबाई l है, एक स्थिर बल T (इसकी दिशा चित्र में दिखाई गई है) और मध्यम प्रतिरोध का बल R भार पर कार्य करता है (इस बल का मापांक R = μV 2, वेक्टर R को भार की गति V के विपरीत निर्देशित किया जाता है)।
लोड, अपनी गति के मापांक के मूल्य को बदले बिना, पाइप के बिंदु बी पर खंड एबी पर अपना आंदोलन समाप्त कर, खंड बीसी में जाता है। खंड बीसी में, एक चर बल F भार पर कार्य करता है, जिसका प्रक्षेपण F x x अक्ष पर दिया जाता है।
भार को भौतिक बिंदु मानकर BC खंड पर इसके संचलन का नियम ज्ञात कीजिए, अर्थात्। एक्स = एफ (टी), जहां एक्स = बीडी। पाइप पर भार के घर्षण की अवहेलना करें।

एक यांत्रिक प्रणाली की गतिज ऊर्जा में परिवर्तन पर प्रमेय
यांत्रिक प्रणाली में वजन 1 और 2, एक बेलनाकार रोलर 3, दो-चरण पुली 4 और 5 होते हैं। सिस्टम के शरीर पुली पर घाव के धागे से जुड़े होते हैं; थ्रेड सेक्शन संबंधित विमानों के समानांतर हैं। रोलर (ठोस सजातीय सिलेंडर) बिना खिसके रेफरेंस प्लेन पर लुढ़कता है। पुली 4 और 5 के चरणों की त्रिज्या क्रमशः आर 4 = 0.3 मीटर, आर 4 = 0.1 मीटर, आर 5 = 0.2 मीटर, आर 5 = 0.1 मीटर है। प्रत्येक चरखी के द्रव्यमान को इसके साथ समान रूप से वितरित माना जाता है बाहरी रिम... वजन 1 और 2 के समर्थन विमान खुरदरे होते हैं, प्रत्येक भार के लिए फिसलने वाला घर्षण गुणांक f = 0.1 होता है।
बल एफ की कार्रवाई के तहत, जिसका मापांक कानून एफ = एफ (एस) के अनुसार बदलता है, जहां एस इसके आवेदन के बिंदु का विस्थापन है, सिस्टम आराम की स्थिति से आगे बढ़ना शुरू कर देता है। जब सिस्टम चलता है, प्रतिरोध बल चरखी 5 पर कार्य करते हैं, जिसका क्षण रोटेशन के अक्ष के सापेक्ष स्थिर और एम 5 के बराबर होता है।
चरखी 4 की कोणीय गति का मान उस समय निर्धारित करें जब बल F के आवेदन के बिंदु का विस्थापन s 1 = 1.2 m के बराबर हो जाता है। 
समस्या समाधान डाउनलोड करें
एक यांत्रिक प्रणाली की गति के अध्ययन के लिए गतिकी के सामान्य समीकरण का अनुप्रयोग
यांत्रिक प्रणाली के लिए, रैखिक त्वरण a 1 निर्धारित करें। मान लें कि ब्लॉक और रोलर्स का द्रव्यमान बाहरी त्रिज्या के साथ वितरित किया जाता है। रस्सियों और बेल्टों को भारहीन और अविभाज्य माना जाता है; कोई फिसलन नहीं है। रोलिंग और स्लाइडिंग घर्षण की उपेक्षा करें। 
समस्या समाधान डाउनलोड करें
एक घूर्णन शरीर के समर्थन की प्रतिक्रियाओं के निर्धारण के लिए डी'अलेम्बर्ट सिद्धांत का अनुप्रयोग
ऊर्ध्वाधर शाफ्ट AK, कोणीय वेग = 10 s -1 के साथ समान रूप से घूमता है, बिंदु A पर एक जोर असर और बिंदु D पर एक बेलनाकार असर द्वारा तय किया जाता है।
एल 1 = 0.3 मीटर की लंबाई के साथ एक भारहीन रॉड 1 शाफ्ट से सख्ती से जुड़ा हुआ है, जिसके मुक्त छोर पर एम 1 = 4 किलो के द्रव्यमान के साथ एक भार है, और एक सजातीय रॉड 2 की लंबाई के साथ है। 2 = 0.6 मी, जिसका द्रव्यमान मी 2 = 8 किग्रा है। दोनों छड़ें एक ही ऊर्ध्वाधर तल में स्थित हैं। शाफ्ट को छड़ के लगाव के बिंदु, साथ ही कोण α और β, तालिका में इंगित किए गए हैं। आयाम AB = BD = DE = EK = b, जहाँ b = 0.4 m. भार को भौतिक बिंदु के रूप में लें।
शाफ्ट के द्रव्यमान की उपेक्षा करके, जोर असर और असर की प्रतिक्रिया निर्धारित करें।

कई विश्वविद्यालय के छात्रों को अपने अध्ययन के पाठ्यक्रम में बुनियादी तकनीकी विषयों जैसे सामग्री की ताकत और सैद्धांतिक यांत्रिकी को पढ़ाने में कुछ चुनौतियों का सामना करना पड़ता है। यह लेख ऐसे ही एक विषय को कवर करेगा - तथाकथित तकनीकी यांत्रिकी।
तकनीकी यांत्रिकी वह विज्ञान है जो विभिन्न तंत्रों, उनके संश्लेषण और विश्लेषण का अध्ययन करता है। व्यवहार में, इसका अर्थ है तीन विषयों का संयोजन - सामग्री का प्रतिरोध, सैद्धांतिक यांत्रिकी और मशीन भागों। यह सुविधाजनक है कि प्रत्येक शिक्षण संस्थान इन पाठ्यक्रमों को पढ़ाने के लिए किस अनुपात में चुनता है।
तदनुसार, अधिकांश नियंत्रण कार्यों में, कार्यों को तीन ब्लॉकों में विभाजित किया जाता है, जिन्हें अलग-अलग या एक साथ हल किया जाना चाहिए। आइए सबसे सामान्य कार्यों पर विचार करें।
खण्ड एक। सैद्धांतिक यांत्रिकी
सिद्धांत में सभी प्रकार की समस्याओं में से, आप अक्सर किनेमेटिक्स और स्टेटिक्स के अनुभाग से समस्याएं पा सकते हैं। ये एक सपाट फ्रेम के संतुलन के लिए समस्याएं हैं, निकायों की गति के नियमों का निर्धारण और गतिज विश्लेषणलिंकेज तंत्र।
एक सपाट फ्रेम के संतुलन पर समस्याओं को हल करने के लिए, बलों की एक समतल प्रणाली के संतुलन समीकरण का उपयोग करना आवश्यक है:
![]()
निर्देशांक अक्षों पर सभी बलों के प्रक्षेपणों का योग शून्य है और किसी भी बिंदु के सापेक्ष सभी बलों के क्षणों का योग शून्य है। इन समीकरणों को एक साथ हल करने पर, हम समतल फ्रेम के सभी समर्थनों की प्रतिक्रियाओं का परिमाण निर्धारित करते हैं।
पिंडों की गति के बुनियादी गतिज मापदंडों को निर्धारित करने की समस्याओं में, किसी दिए गए प्रक्षेपवक्र या भौतिक बिंदु की गति के नियम के आधार पर, इसकी गति, त्वरण (पूर्ण, स्पर्शरेखा और सामान्य) और त्रिज्या निर्धारित करना आवश्यक है। प्रक्षेपवक्र की वक्रता। एक बिंदु की गति के नियम प्रक्षेपवक्र के समीकरणों द्वारा दिए गए हैं:
निर्देशांक अक्षों पर एक बिंदु की गति का अनुमान संबंधित समीकरणों को अलग करके पाया जाता है:
![]()
वेग समीकरणों में अंतर करते हुए, हम बिंदु त्वरण का प्रक्षेपण पाते हैं। स्पर्शरेखा और सामान्य त्वरण, प्रक्षेपवक्र की वक्रता त्रिज्या रेखांकन या विश्लेषणात्मक रूप से पाए जाते हैं:
![]()
![]()
लिंकेज का गतिज विश्लेषण निम्नलिखित योजना के अनुसार किया जाता है:
- तंत्र को असुर समूहों में विभाजित करना
- प्रत्येक समूह के लिए गति और त्वरण की योजनाओं का निर्माण
- तंत्र के सभी लिंक और बिंदुओं की गति और त्वरण का निर्धारण।
खंड दो। सामग्री की ताकत
सामग्री का प्रतिरोध कई अलग-अलग कार्यों के साथ समझने के लिए एक जटिल खंड है, जिनमें से अधिकांश को अपनी विधि के अनुसार हल किया जाता है। छात्रों के लिए उन्हें हल करना आसान बनाने के लिए, अक्सर लागू यांत्रिकी के दौरान वे संरचनाओं के सरल प्रतिरोध के लिए प्राथमिक समस्याएं देते हैं - इसके अलावा, संरचना का प्रकार और सामग्री, एक नियम के रूप में, प्रोफाइल पर निर्भर करता है विश्वविद्यालय।
सबसे आम समस्याएं तनाव-संपीड़न, झुकने और मरोड़ हैं।
तनाव-संपीड़न की समस्याओं में, अनुदैर्ध्य बलों और सामान्य तनावों के आरेखों को प्लॉट करना आवश्यक है, और कभी-कभी संरचनात्मक वर्गों के विस्थापन भी।
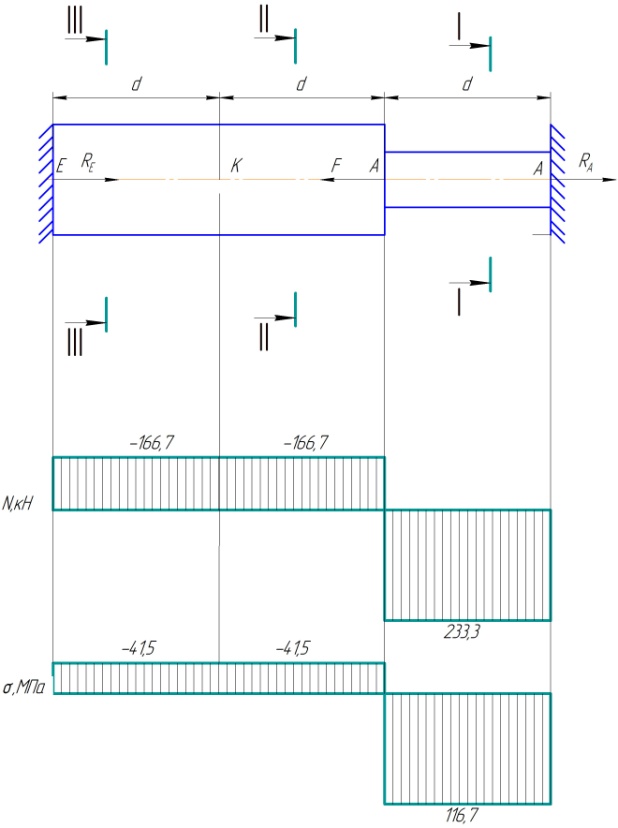
ऐसा करने के लिए, संरचना को खंडों में तोड़ना आवश्यक है, जिसकी सीमाएं वे स्थान होंगे जहां भार लगाया जाता है या क्रॉस-अनुभागीय क्षेत्र बदलता है। इसके अलावा, एक कठोर शरीर के संतुलन के लिए सूत्रों का उपयोग करके, हम वर्गों की सीमाओं पर आंतरिक बलों के मूल्यों को निर्धारित करते हैं, और, क्रॉस-अनुभागीय क्षेत्र को ध्यान में रखते हुए, आंतरिक तनाव।
प्राप्त आंकड़ों के आधार पर, हम ग्राफ की धुरी के रूप में संरचना की समरूपता की धुरी लेते हुए ग्राफ - आरेख बनाते हैं।
मरोड़ की समस्या झुकने की समस्याओं के समान होती है, सिवाय इसके कि तन्यता बलों के बजाय शरीर पर टॉर्क लगाया जाता है। इसे ध्यान में रखते हुए, गणना के चरणों को दोहराना आवश्यक है - वर्गों में विभाजित करना, घुमा क्षणों का निर्धारण करना और कोणों को घुमाना और आरेखों की साजिश करना।
झुकने की समस्याओं में, भारित बीम के लिए कतरनी बलों और झुकने वाले क्षणों की गणना और निर्धारण करना आवश्यक है।
सबसे पहले, उन समर्थनों की प्रतिक्रियाएं जिनमें बीम तय की गई है, निर्धारित की जाती हैं। ऐसा करने के लिए, आपको सभी अभिनय प्रयासों को ध्यान में रखते हुए, संरचना के संतुलन समीकरणों को लिखना होगा।
उसके बाद, बार को खंडों में विभाजित किया जाता है, जिसकी सीमाएं बाहरी बलों के आवेदन के बिंदु होंगी। प्रत्येक खंड के संतुलन पर अलग से विचार करके, कतरनी बलों और वर्गों की सीमाओं पर झुकने के क्षण निर्धारित किए जाते हैं। प्राप्त आंकड़ों के आधार पर, आरेख तैयार किए जाते हैं।
क्रॉस-सेक्शनल स्ट्रेंथ चेक निम्नानुसार किया जाता है:
- खतरनाक खंड का स्थान निर्धारित किया जाता है - वह खंड जहां सबसे बड़ा झुकने वाला क्षण कार्य करेगा।
- बार के क्रॉस-सेक्शन के प्रतिरोध का क्षण झुकने की ताकत की स्थिति से निर्धारित होता है।
- अनुभाग का विशिष्ट आकार निर्धारित किया जाता है - व्यास, पार्श्व लंबाई या प्रोफ़ाइल संख्या।
खंड तीन। मशीन के पुर्ज़े
अनुभाग "मशीन पार्ट्स" वास्तविक परिस्थितियों में काम कर रहे तंत्र की गणना के लिए सभी कार्यों को जोड़ता है - यह एक कन्वेयर ड्राइव या गियर ट्रांसमिशन हो सकता है। कार्य को इस तथ्य से बहुत सुविधा मिलती है कि संदर्भ पुस्तकों में सभी सूत्र और गणना के तरीके दिए गए हैं, और छात्र को उनमें से केवल उन लोगों को चुनने की आवश्यकता है जो किसी दिए गए तंत्र के लिए उपयुक्त हैं।
साहित्य
- सैद्धांतिक यांत्रिकी: उच्च शिक्षण संस्थानों / एड के मैकेनिकल इंजीनियरिंग, निर्माण, परिवहन, उपकरण बनाने की विशेषता के पत्राचार छात्रों के लिए पद्धति संबंधी निर्देश और परीक्षण कार्य। प्रो एस.एम. तर्गा, - एम।: हायर स्कूल, 1989 चौथा संस्करण;
- ए वी डार्कोव, जी एस शापिरो। "सामग्री की ताकत";
- चेर्नवस्की एस.ए. मशीन के पुर्जों का पाठ्यक्रम डिजाइन: पाठ्यपुस्तक। तकनीकी स्कूलों के इंजीनियरिंग विशिष्टताओं के छात्रों के लिए मैनुअल / एस। ए। चेर्नवस्की, के। एन। बोकोव, आई। एम। चेर्निन एट अल। - दूसरा संस्करण।, संशोधित। और जोड़। - एम। मैकेनिकल इंजीनियरिंग, 1988 ।-- 416 पी।: बीमार।
कस्टम तकनीकी यांत्रिकी समाधान
हमारी कंपनी यांत्रिकी में समस्याओं और नियंत्रण कार्यों को हल करने के लिए सेवाएं भी प्रदान करती है। यदि आपको इस विषय को समझने में कठिनाई हो रही है, तो आप हमेशा हमसे विस्तृत समाधान मंगवा सकते हैं। हम चुनौतीपूर्ण कार्य करते हैं!
मुक्त हो सकता है।
तकनीकी यांत्रिकी के पाठ्यक्रम के सभी वर्गों के लिए कम्प्यूटेशनल-विश्लेषणात्मक और कम्प्यूटेशनल-ग्राफिक कार्यों के लिए कार्य दिए गए हैं। प्रत्येक कार्य में संक्षिप्त कार्यप्रणाली निर्देशों के साथ समस्याओं के समाधान का विवरण शामिल है, समाधान के उदाहरण दिए गए हैं। परिशिष्ट में आवश्यक संदर्भ सामग्री है। माध्यमिक व्यावसायिक शिक्षण संस्थानों के निर्माण विशिष्टताओं के छात्रों के लिए।
विश्लेषणात्मक तरीके से आदर्श कनेक्शन की प्रतिक्रियाओं का निर्धारण।
1. उस बिंदु को इंगित करें जिसके संतुलन पर विचार किया जा रहा है। कार्यों में स्वतंत्र कामऐसा बिंदु शरीर के गुरुत्वाकर्षण का केंद्र या सभी छड़ों और धागों का प्रतिच्छेदन बिंदु होता है।
2. सक्रिय बलों को विचाराधीन बिंदु पर लागू करें। स्वतंत्र कार्य के कार्यों में, सक्रिय बल शरीर का अपना वजन या भार का भार होता है, जो नीचे की ओर निर्देशित होता है (अधिक सही ढंग से, पृथ्वी के गुरुत्वाकर्षण के केंद्र की ओर)। एक ब्लॉक की उपस्थिति में, वजन का भार धागे के साथ संबंधित बिंदु पर कार्य करता है। इस बल की क्रिया की दिशा रेखाचित्र से स्थापित होती है। शरीर के वजन को आमतौर पर जी अक्षर से दर्शाया जाता है।
3. कनेक्शन की प्रतिक्रियाओं के साथ उनकी कार्रवाई को बदलकर, मानसिक रूप से कनेक्शन त्यागें। प्रस्तावित कार्यों में, तीन प्रकार के संबंधों का उपयोग किया जाता है - एक आदर्श रूप से चिकना विमान, आदर्श रूप से कठोर रेक्टिलिनियर रॉड और आदर्श रूप से लचीले धागे, - इसके बाद क्रमशः एक विमान, एक रॉड और एक धागा के रूप में संदर्भित किया जाता है।
विषयसूची
प्रस्तावना
खंड I. स्वतंत्र और नियंत्रण कार्य
अध्याय 1. सैद्धांतिक यांत्रिकी। स्थिति-विज्ञान
1.1. एक विश्लेषणात्मक तरीके से आदर्श बांड की प्रतिक्रियाओं का निर्धारण
1.2. ऊर्ध्वाधर भार की कार्रवाई के तहत दो समर्थनों पर बीम की समर्थन प्रतिक्रियाओं का निर्धारण
1.3. खंड के गुरुत्वाकर्षण के केंद्र की स्थिति का निर्धारण
अध्याय 2. सामग्री का प्रतिरोध
2.1. ताकत के आधार पर छड़ के क्रॉस-सेक्शन का चयन
2.2. खंड की जड़ता के मुख्य केंद्रीय क्षणों का निर्धारण
2.3. एक साधारण बीम के लिए कतरनी बलों और झुकने के क्षणों को प्लॉट करना
2.4. केंद्रीय संपीड़न बल के अनुमेय मूल्य का निर्धारण
अध्याय 3. संरचनाओं के स्टैटिक्स
3.1. सरलतम सिंगल-समोच्च फ्रेम के लिए आंतरिक बलों को प्लॉट करना
3.2. मैक्सवेल-क्रेमोना आरेख का निर्माण करके ट्रस रॉड्स में प्रयासों का चित्रमय निर्धारण
3.3. सरलतम ब्रैकट फ्रेम में रैखिक गति का निर्धारण
3.4. तीन क्षणों के समीकरण के अनुसार एक स्थिर रूप से अनिश्चित (निरंतर) बीम की गणना
खंड द्वितीय। निपटान और ग्राफिक कार्य
अध्याय 4. सैद्धांतिक यांत्रिकी। स्थिति-विज्ञान
4.1. सरलतम ब्रैकट ट्रस की सलाखों में बलों का निर्धारण
4.2. दो समर्थनों पर बीम की समर्थन प्रतिक्रियाओं का निर्धारण
4.3. खंड के गुरुत्वाकर्षण के केंद्र की स्थिति का निर्धारण
अध्याय 5. सामग्री का प्रतिरोध
5.1. स्थिर रूप से अनिश्चित प्रणाली की छड़ में बलों का निर्धारण
5.2. खंड की जड़ता के मुख्य क्षणों का निर्धारण
5.3. लुढ़का हुआ आई-बीम के क्रॉस-सेक्शन का चयन
5.4. केंद्रीय रूप से संपीड़ित समग्र अकड़ के खंड का चयन
अध्याय 6. संरचनाओं के स्टैटिक्स
6.1. तीन-व्यक्त मेहराब के वर्गों में प्रयासों का निर्धारण
6.2. मैक्सवेल - क्रेमोना आरेख का निर्माण करके एक फ्लैट ट्रस की सलाखों में प्रयासों का चित्रमय निर्धारण
6.3. एक स्थिर रूप से अनिश्चित फ्रेम की गणना
6.4. तीन क्षणों के समीकरण का उपयोग करके एक सतत बीम की गणना
अनुप्रयोग
ग्रंथ सूची।
सुविधाजनक प्रारूप में ई-पुस्तक मुफ्त डाउनलोड करें, देखें और पढ़ें:
तकनीकी यांत्रिकी पर समस्याओं का संग्रह पुस्तक डाउनलोड करें, सेटकोव वी.आई., 2003 - fileskachat.com, तेज और मुफ्त डाउनलोड।
डाउनलोड पीडीऍफ़
नीचे आप इस पुस्तक को पूरे रूस में डिलीवरी के साथ सर्वोत्तम रियायती मूल्य पर खरीद सकते हैं।