Teoreetiline mehaanika- See on mehaanika haru, mis sätestab materiaalsete kehade mehaanilise liikumise ja mehaanilise vastasmõju põhiseadused.
Teoreetiline mehaanika on teadus, milles uuritakse kehade liikumist ajas (mehaanilised liikumised). See on aluseks teistele mehaanika osadele (elastsuse teooria, materjalide vastupidavus, plastilisuse teooria, mehhanismide ja masinate teooria, hüdroaerodünaamika) ja paljudele tehnilistele distsipliinidele.
mehaaniline liikumine- see on ajas muutumine materiaalsete kehade suhtelises asendis ruumis.
Mehaaniline interaktsioon- see on selline interaktsioon, mille tulemusena muutub mehaaniline liikumine või muutub kehaosade suhteline asend.
Jäik kere staatika
Staatika- See on teoreetilise mehaanika haru, mis käsitleb tahkete kehade tasakaalu ja ühe jõudude süsteemi muundamise probleeme sellega võrdväärseks teiseks.
- Staatika põhimõisted ja seadused
- Absoluutselt jäik kere(tahke keha, keha) on materiaalne keha, mille punktide vaheline kaugus ei muutu.
- Materiaalne punkt on keha, mille mõõtmed võib vastavalt probleemi tingimustele tähelepanuta jätta.
- lahtine keha on keha, mille liikumisele piiranguid ei sea.
- Mittevaba (seotud) keha on keha, mille liikumine on piiratud.
- Ühendused- need on kehad, mis takistavad vaadeldava objekti (keha või kehade süsteemi) liikumist.
- Suhtlemisreaktsioon on jõud, mis iseloomustab sideme mõju jäigale kehale. Kui käsitleda jõudu, millega jäik keha sidemele mõjub, on tegevus, siis sideme reaktsioon on vastutegevus. Sel juhul rakendatakse ühendusele jõud - toime ja ühenduse reaktsioon tahkele kehale.
- mehaaniline süsteem on omavahel ühendatud kehade või materiaalsete punktide kogum.
- Tahke võib pidada mehaaniliseks süsteemiks, mille punktide asukohad ja kaugus ei muutu.
- Võimsus on vektorsuurus, mis iseloomustab ühe materiaalse keha mehaanilist toimet teisele.
Jõudu kui vektorit iseloomustavad rakenduspunkt, toimesuund ja absoluutväärtus. Jõumooduli mõõtühik on Newton. - jõujoon on sirgjoon, mida mööda jõuvektor on suunatud.
- Kontsentreeritud jõud on ühes punktis rakendatav jõud.
- Jaotatud jõud (jaotatud koormus)- need on jõud, mis mõjuvad keha mahu, pinna või pikkuse kõikidele punktidele.
Jaotatud koormuse annab ruumalaühikule (pinnale, pikkusele) mõjuv jõud.
Jaotatud koormuse mõõde on N / m 3 (N / m 2, N / m). - Väline jõud on jõud, mis mõjub kehalt, mis ei kuulu vaadeldavasse mehaanilisse süsteemi.
- sisemine jõud on jõud, mis mõjub mehaanilise süsteemi materiaalsele punktile teisest vaadeldavasse süsteemi kuuluvast materiaalsest punktist.
- Jõusüsteem on mehaanilisele süsteemile mõjuvate jõudude kogum.
- Lame jõudude süsteem on jõudude süsteem, mille toimejooned asuvad samal tasapinnal.
- Ruumiline jõudude süsteem on jõudude süsteem, mille toimejooned ei asu samal tasapinnal.
- Koonduv jõusüsteem on jõudude süsteem, mille toimejooned ristuvad ühes punktis.
- Suvaline jõudude süsteem on jõudude süsteem, mille toimejooned ei ristu ühes punktis.
- Samaväärsed jõudude süsteemid- need on jõudude süsteemid, mille asendamine teisega ei muuda keha mehaanilist seisundit.
Aktsepteeritud nimetus: . - Tasakaal Seisund, milles keha jääb paigale või liigub jõudude toimel ühtlaselt sirgjooneliselt.
- Tasakaalustatud jõudude süsteem- see on jõudude süsteem, mis vabale tahkele kehale rakendatuna ei muuda selle mehaanilist olekut (ei vii tasakaalust välja).
 .
. - tulenev jõud on jõud, mille mõju kehale on samaväärne jõudude süsteemi toimega.
 .
. - Võimu hetk on väärtus, mis iseloomustab jõu pöörlemisvõimet.
- Võimsuspaar on süsteem kahest paralleelsest, absoluutväärtuselt võrdsest vastassuunas suunatud jõust.
Aktsepteeritud nimetus: .
Paari jõu mõjul teeb keha pöörlevat liikumist. - Jõu projektsioon teljele- see on segment, mis on ümbritsetud perpendikulaaride vahele, mis on tõmmatud jõuvektori algusest ja lõpust sellele teljele.
Projektsioon on positiivne, kui lõigu suund langeb kokku telje positiivse suunaga. - Jõu projektsioon tasapinnal on vektor tasapinnal, mis jääb jõuvektori algusest ja lõpust sellele tasapinnale tõmmatud perpendikulaaride vahele.
- Seadus 1 (inertsiseadus). Eraldatud materjalipunkt on puhkeasendis või liigub ühtlaselt ja sirgjooneliselt.
Materiaalse punkti ühtlane ja sirgjooneline liikumine on liikumine inertsist. Materiaalse punkti ja jäiga keha tasakaaluseisundi all mõeldakse mitte ainult puhkeseisundit, vaid ka inertsist liikumist. Jäiga keha jaoks on erinevat tüüpi inertsliikumist, näiteks jäiga keha ühtlane pöörlemine ümber fikseeritud telje. - Seadus 2. Jäik keha on kahe jõu mõjul tasakaalus ainult siis, kui need jõud on suuruselt võrdsed ja on suunatud mööda ühist toimejoont vastassuundades.
Neid kahte jõudu nimetatakse tasakaalustatud.
Üldiselt öeldakse, et jõud on tasakaalus, kui jäik keha, millele need jõud rakendatakse, on puhkeasendis. - Seadus 3. Jäiga keha seisundit (sõna "olek" tähendab siin liikumis- või puhkeolekut) rikkumata saab tasakaalustavaid jõude lisada ja kõrvale jätta.
Tagajärg. Jäiga keha seisundit häirimata saab jõudu mööda selle toimejoont üle kanda ükskõik millisesse keha punkti.
Kahte jõusüsteemi nimetatakse ekvivalentseteks, kui ühte neist saab asendada teisega ilma jäiga keha seisundit häirimata. - Seadus 4.Ühes punktis rakendatud kahe jõu resultant rakendatakse samas punktis, on absoluutväärtuses võrdne nendele jõududele ehitatud rööpküliku diagonaaliga ja on suunatud mööda seda
diagonaalid.
Tulemuse moodul on: - Seadus 5 (tegevuse ja reaktsiooni võrdsuse seadus). Jõud, millega kaks keha teineteisele mõjuvad, on võrdse suurusega ja suunatud piki üht sirget vastassuundades.
Seda tuleks meeles pidada tegevust- kehale rakendatav jõud B, ja opositsioon- kehale rakendatav jõud A, ei ole tasakaalus, kuna on kinnitatud erinevate kehade külge. - Seadus 6 (kõvenemise seadus). Mittetahke keha tasakaal selle tahkumisel ei häiri.
Ei tohi unustada, et tasakaalutingimused, mis on jäiga keha jaoks vajalikud ja piisavad, on vajalikud, kuid mitte piisavad vastava mittejäiga keha jaoks. - Seadus 7 (võlakirjadest vabastamise seadus). Mittevaba tahket keha võib pidada vabaks, kui ta on vaimselt vabastatud sidemetest, asendades sidemete toime vastavate sidemete reaktsioonidega.
- Seosed ja nende reaktsioonid
- Sile pind piirab liikumist piki normaalset toetuspinnale. Reaktsioon on suunatud pinnaga risti.
- Liigendatud liigutatav tugi piirab keha liikumist piki normaalset võrdlustasandini. Reaktsioon on suunatud piki normaalset tugipinnale.
- Liigendatud fikseeritud tugi neutraliseerib igasugust liikumist pöörlemisteljega risti olevas tasapinnas.
- Liigendatud kaaluta varras takistab keha liikumist piki varda joont. Reaktsioon suunatakse piki varda joont.
- Pime lõpetamine takistab mis tahes liikumist ja pöörlemist tasapinnas. Selle toime saab asendada jõuga, mis on esitatud kahe komponendi ja jõupaari kujul koos momendiga.




Kinemaatika
Kinemaatika- teoreetilise mehaanika osa, mis käsitleb mehaanilise liikumise üldgeomeetrilisi omadusi kui ruumis ja ajas toimuvat protsessi. Liikuvaid objekte peetakse geomeetrilisteks punktideks või geomeetrilisteks kehadeks.
- Kinemaatika põhimõisted
- Punkti (keha) liikumise seadus on ruumi punkti (keha) asukoha sõltuvus ajast.
- Punkti trajektoor on ruumipunkti asukohtade asukoht selle liikumise ajal.
- Punkti (keha) kiirus- see on ruumi punkti (keha) asukoha muutumise tunnusjoon ajas.
- Punkti (keha) kiirendus- see on punkti (keha) kiiruse aja muutumise tunnus.
- Punkti kinemaatiliste karakteristikute määramine
- Punkti trajektoor
Vektori referentssüsteemis kirjeldatakse trajektoori avaldisega: .
Koordinaatide referentssüsteemis määratakse trajektoor punkti liikumise seaduse järgi ja seda kirjeldatakse avaldiste abil z = f(x,y) ruumis või y = f(x)- lennukis.
Looduslikus võrdlussüsteemis on trajektoor ette määratud. - Punkti kiiruse määramine vektori koordinaatsüsteemis
Punkti liikumise täpsustamisel vektori koordinaatsüsteemis nimetatakse liikumise suhet ajavahemikku kiiruse keskmiseks väärtuseks selles ajavahemikus: .
Võttes ajaintervalli lõpmata väikese väärtusena, saadakse kiiruse väärtus aastal Sel hetkel aeg (hetkkiiruse väärtus): .
.
Keskmise kiiruse vektor on suunatud piki vektorit punkti liikumise suunas, vektor hetkeline kiirus suunatud tangentsiaalselt trajektoorile punkti liikumise suunas.
Järeldus: punkti kiirus on vektorsuurus, mis võrdub liikumisseaduse tuletisega aja suhtes.
Tuletisomadus: mis tahes väärtuse ajatuletis määrab selle väärtuse muutumise kiiruse. - Punkti kiiruse määramine koordinaatide tugisüsteemis
Punktide koordinaatide muutumise kiirus: .
.
Ristkülikukujulise koordinaatsüsteemiga punkti täiskiiruse moodul on võrdne: .
.
Kiirusvektori suund määratakse roolinurkade koosinustega: ,
,
kus on kiirusvektori ja koordinaattelgede vahelised nurgad. - Punkti kiiruse määramine loomulikus tugisüsteemis
Punkti kiirust loomulikus tugisüsteemis defineeritakse punkti liikumisseaduse tuletisena: .
Eelnevate järelduste kohaselt on kiirusvektor suunatud trajektoorile tangentsiaalselt punkti liikumise suunas ja telgedes määrab ainult üks projektsioon .
- Jäiga keha kinemaatika
- Jäikade kehade kinemaatikas lahendatakse kaks peamist probleemi:
1) liikumisülesanne ja keha kui terviku kinemaatiliste omaduste määramine;
2) keha punktide kinemaatikaomaduste määramine. - Jäiga keha translatsiooniline liikumine
Translatsiooniline liikumine on liikumine, mille käigus keha kahe punkti kaudu tõmmatud sirgjoon jääb paralleelseks oma algse asendiga.
Teoreem: translatsioonilises liikumises liiguvad kõik keha punktid mööda samu trajektoore ning neil on igal ajahetkel sama kiirus ja kiirendus absoluutväärtuses ja suunas.
Järeldus: jäiga keha translatsioonilise liikumise määrab selle mis tahes punkti liikumine ja seetõttu taandatakse selle liikumise ülesanne ja uurimine punkti kinemaatikale. - Jäiga keha pöörlev liikumine ümber fikseeritud telje
Jäiga keha pöörlev liikumine ümber fikseeritud telje on jäiga keha liikumine, mille käigus kaks kehale kuuluvat punkti jäävad liikumatuks kogu liikumisaja jooksul.
Kere asend määratakse pöördenurga järgi. Nurga mõõtühikuks on radiaanid. (Radiaan – kesknurk ring, mille kaare pikkus on võrdne raadiusega, sisaldab ringi kogunurk 2π radiaan.)
Keha pöörleva liikumise seadus ümber fikseeritud telje.
Keha nurkkiirus ja nurkkiirendus määratakse diferentseerimismeetodiga:
— nurkkiirus, rad/s;
— nurkkiirendus, rad/s².
Kui lõikame keha teljega risti oleva tasapinna võrra, vali punkt pöörlemisteljel KOOS ja suvaline punkt M, siis punkt M kirjeldab asja ümber KOOS raadiusega ring R. ajal dt on elementaarne pöörlemine läbi nurga , samas kui punkt M liigub piki trajektoori mingi vahemaa ulatuses .
.
Lineaarne kiirusmoodul: .
.
punkti kiirendus M teadaoleva trajektooriga määratakse selle komponentidega: ,
,
kus .
.
Selle tulemusena saame valemid
tangentsiaalne kiirendus: ;
;
tavaline kiirendus: .
.

Dünaamika
Dünaamika on teoreetilise mehaanika haru, mis tegeleb mehaaniline liikumine materiaalsed kehad, sõltuvalt neid põhjustavatest põhjustest.
- Dünaamika põhimõisted
- inerts- see on materiaalsete kehade omadus säilitada puhkeseisund või ühtlane sirgjooneline liikumine, kuni välised jõud seda olekut muudavad.
- Kaal on keha inertsi kvantitatiivne mõõt. Massiühik on kilogramm (kg).
- Materiaalne punkt on massiga keha, mille mõõtmed jäetakse selle ülesande lahendamisel tähelepanuta.
- Mehaanilise süsteemi massikese on geomeetriline punkt, mille koordinaadid määratakse valemitega:
kus m k , x k , y k , z k- mass ja koordinaadid k- mehaanilise süsteemi see punkt, m on süsteemi mass.
Ühtlases raskusväljas langeb massikeskme asend kokku raskuskeskme asukohaga. - Materiaalse keha inertsmoment telje suhtes on pöörleva liikumise ajal tekkiva inertsi kvantitatiivne mõõt.
Materiaalse punkti inertsimoment telje ümber on võrdne punkti massi ja punkti kauguse teljest ruudu korrutisega: .
.
Süsteemi (keha) inertsimoment telje ümber on võrdne kõigi punktide inertsimomentide aritmeetilise summaga:
- Materiaalse punkti inertsjõud on vektorsuurus, mis on absoluutväärtuses võrdne punkti massi ja kiirendusmooduli korrutisega ning on suunatud kiirendusvektorile vastupidiselt:
- Materiaalse keha inertsjõud on vektorsuurus, mis on absoluutväärtuses võrdne kehamassi ja keha massikeskme kiirendusmooduli korrutisega ning on suunatud massikeskme kiirendusvektorile vastupidiselt: ,
kus on keha massikeskme kiirendus. - Elementaarjõu impulss on vektorkogus, mis võrdub jõuvektori korrutisega lõpmata väikese ajaintervalliga dt:
.
Kogu jõuimpulss Δt jaoks on võrdne elementaarimpulsside integraaliga: .
. - Elementaarne jõutöö on skalaar dA, võrdne skalaariga
Kinemaatika
Materiaalse punkti kinemaatika
Punkti kiiruse ja kiirenduse määramine selle etteantud liikumisvõrrandite järgi
Antud: Punkti liikumisvõrrandid: x = 12 sin(πt/6), cm; y= 6 cos 2 (πt/6), cm.
Määrake selle trajektoori tüüp ja ajahetk t = 1 s leida punkti asukoht trajektooril, selle kiirus, täis-, tangentsiaalne ja normaalkiirendus, samuti trajektoori kõverusraadius.
Jäiga keha translatiivne ja pöörlev liikumine

Arvestades:
t = 2 s; r 1 = 2 cm, R 1 = 4 cm; r2 = 6 cm, R2 = 8 cm; r 3 \u003d 12 cm, R 3 = 16 cm; s 5 \u003d t 3 - 6t (cm).
Määrata ajahetkel t = 2 punktide A, C kiirused; ratta 3 nurkkiirendus; punkti B kiirendus ja raami kiirendus 4.
Lamemehhanismi kinemaatiline analüüs

Arvestades:
R1, R2, L, AB, ω1.
Leia: ω 2 .

Lamemehhanism koosneb vardadest 1, 2, 3, 4 ja liugurist E. Vardad on ühendatud silindriliste hingede abil. Punkt D asub riba AB keskel.
Antud on: ω 1 , ε 1 .
Leia: kiirused V A , V B , V D ja V E ; nurkkiirused ω 2, ω 3 ja ω 4; kiirendus a B ; lüli AB nurkkiirendus ε AB; mehhanismi lülide 2 ja 3 kiiruste P 2 ja P 3 hetkekeskmete asukohad.
Punkti absoluutkiiruse ja absoluutkiirenduse määramine

Ristkülikukujuline plaat pöörleb ümber fikseeritud telje vastavalt seadusele φ = 6 t 2 - 3 t 3. Nurga φ lugemise positiivne suund on joonistel näidatud kaare noolega. Pöörlemistelg OO 1 asub plaadi tasapinnal (plaat pöörleb ruumis).
Punkt M liigub mööda sirget BD piki plaati. Selle suhtelise liikumise seadus on antud, st sõltuvus s = AM = 40 (t - 2 t 3) - 40(s - sentimeetrites, t - sekundites). Kaugus b = 20 cm. Joonisel on punkt M näidatud asendis, kus s = AM > 0 (s< 0 punkt M on teisel pool punkti A).
Leia punkti M absoluutne kiirus ja absoluutne kiirendus ajahetkel t 1 = 1 s.
Dünaamika
Materiaalse punkti liikumise diferentsiaalvõrrandite integreerimine muutuvate jõudude toimel
Koormus D massiga m, olles saanud punktis A algkiiruse V 0, liigub vertikaaltasandil paiknevas kõveras torus ABC. Lõigul AB, mille pikkus on l, mõjutab koormust konstantne jõud T (selle suund on näidatud joonisel) ja kandja takistusjõud R (selle jõu moodul on R = μV 2, vektor R on suunatud koormuse kiirusele V).
Koormus, olles lõpetanud liikumise lõigul AB, toru punktis B, ilma kiirusmooduli väärtust muutmata, liigub sektsiooni BC. Lõigul BC mõjub koormusele muutuv jõud F, mille projektsioon F x teljel x on antud.
Arvestades koormust materiaalse punktina, leida selle liikumise seadus lõigul BC, s.o. x = f(t), kus x = BD. Ignoreeri toru koormuse hõõrdumist.

Teoreem mehaanilise süsteemi kineetilise energia muutumise kohta
Mehaaniline süsteem koosneb raskustest 1 ja 2, silindrilisest rullist 3, kaheastmelistest rihmaratastest 4 ja 5. Süsteemi korpused on ühendatud rihmaratastele keritud keermetega; niitide lõigud on paralleelsed vastavate tasanditega. Rull (tahke homogeenne silinder) veereb mööda võrdlustasapinda libisemata. Rihmarataste 4 ja 5 astmete raadiused on vastavalt R 4 = 0,3 m, r 4 = 0,1 m, R 5 = 0,2 m, r 5 = 0,1 m. Iga rihmaratta mass loetakse ühtlaselt jaotunud piki selle välisserva . Raskuste 1 ja 2 kandetasandid on karedad, iga raskuse libisemishõõrdetegur on f = 0,1.
Jõu F toimel, mille moodul muutub vastavalt seadusele F = F(s), kus s on selle rakenduspunkti nihe, hakkab süsteem liikuma puhkeseisundist. Süsteemi liikumisel mõjuvad rihmarattale 5 takistusjõud, mille moment pöörlemistelje suhtes on konstantne ja võrdne M 5 -ga.
Määrake rihmaratta 4 nurkkiiruse väärtus hetkel, mil jõu F rakenduspunkti nihe s võrdub s 1 = 1,2 m. 
Laadige lahendus alla
Dünaamika üldvõrrandi rakendamine mehaanilise süsteemi liikumise uurimisel
Mehaanilise süsteemi puhul määrake lineaarkiirendus a 1 . Arvestage, et plokkide ja rullide puhul on massid jaotatud piki välimist raadiust. Kaableid ja rihmasid peetakse kaalutuks ja pikendamatuks; libisemist pole. Ignoreeri veeremis- ja libisemishõõrdumist. 
Laadige lahendus alla
D'Alemberti põhimõtte rakendamine pöörleva keha tugede reaktsioonide määramisel
Vertikaalne võll AK, mis pöörleb ühtlaselt nurkkiirusega ω = 10 s -1, on fikseeritud tõukelaagriga punktis A ja silindrilise laagriga punktis D.
Võlli külge on jäigalt kinnitatud kaaluta varras 1 pikkusega l 1 = 0,3 m, mille vabas otsas on koormus massiga m 1 = 4 kg ja homogeenne varras 2 pikkusega l 2 = 0,6 m, massiga m 2 = 8 kg. Mõlemad vardad asuvad samal vertikaalsel tasapinnal. Varraste kinnituspunktid võllile, samuti nurgad α ja β on näidatud tabelis. Mõõdud AB=BD=DE=EK=b, kus b = 0,4 m. Võtke koorem materiaalseks punktiks.
Jättes tähelepanuta võlli massi, määrake tõukejõu laagri ja laagri reaktsioonid.

Paljud ülikooliõpilased seisavad silmitsi teatud raskustega, kui nad hakkavad oma õpingute käigus õpetama põhilisi tehnilisi erialasid, nagu materjalide tugevus ja teoreetiline mehaanika. Selles artiklis käsitletakse ühte neist teemadest - nn tehnilist mehaanikat.
Tehniline mehaanika on teadus, mis uurib erinevaid mehhanisme, nende sünteesi ja analüüsi. Praktikas tähendab see kolme distsipliini – materjalide tugevuse, teoreetilise mehaanika ja masinaosade – kombinatsiooni. See on mugav selle poolest, et iga õppeasutus valib, millises vahekorras neid kursusi õpetada.
Vastavalt sellele on enamikes kontrolltöödes ülesanded jagatud kolme plokki, mis tuleb lahendada eraldi või koos. Vaatleme kõige levinumaid ülesandeid.
Esimene osa. Teoreetiline mehaanika
Teoreetilise mehaanika mitmesugustest probleemidest võib kõige sagedamini kohata ülesandeid kinemaatika ja staatika osast. Need on ülesanded tasapinnalise raami tasakaalustamiseks, kehade liikumisseaduste määramiseks ja kinemaatiline analüüs kangi mehhanism.
Tasapinnalise raami tasakaaluprobleemide lahendamiseks on vaja tasapinnalise jõudude süsteemi jaoks kasutada tasakaaluvõrrandit:
![]()
Kõikide jõudude projektsioonide summa koordinaattelgedel on võrdne nulliga ja kõigi jõudude momentide summa mis tahes punkti suhtes on võrdne nulliga. Neid võrrandeid koos lahendades määrame tasapinnalise raami kõigi tugede reaktsioonide suuruse.
Kehade liikumise peamiste kinemaatiliste parameetrite määramise ülesannetes on etteantud trajektoori või materiaalse punkti liikumisseaduse alusel vaja määrata selle kiirus, kiirendus (täis-, tangentsiaalne ja normaal) ja raadius. trajektoori kõverus. Punktide liikumise seadused on antud trajektoori võrranditega:
Punktide kiiruse projektsioonid koordinaatide telgedel leitakse vastavate võrrandite diferentseerimisel:
![]()
Kiirusvõrrandeid diferentseerides leiame punkti kiirenduse projektsioonid. Tangentsiaalne ja normaalkiirendus, trajektoori kõverusraadius leitakse graafiliselt või analüütiliselt:
![]()
![]()
Kangi mehhanismi kinemaatiline analüüs viiakse läbi vastavalt järgmisele skeemile:
- Mehhanismi jagamine Assuri rühmadeks
- Konstruktsioon iga kiiruse ja kiirenduse plaanirühma jaoks
- Mehhanismi kõigi lülide ja punktide kiiruste ja kiirenduste määramine.
Teine osa. Materjalide tugevus
Materjalide tugevus on üsna raskesti mõistetav lõik, kus on palju erinevaid ülesandeid, millest enamik on lahendatud oma metoodika järgi. Nende lahenduse lihtsustamiseks üliõpilastele esitatakse rakendusmehaanika käigus kõige sagedamini elementaarsed ülesanded lihtsa konstruktsioonitakistuse jaoks - pealegi oleneb konstruktsiooni tüüp ja materjal reeglina ülikooli profiilist.
Levinumad probleemid on pinge-surve, painutamine ja väändumine.
Pinge-surveülesannetes on vaja konstrueerida pikijõudude ja normaalpingete, vahel ka konstruktsioonilõikude nihkete diagramme.
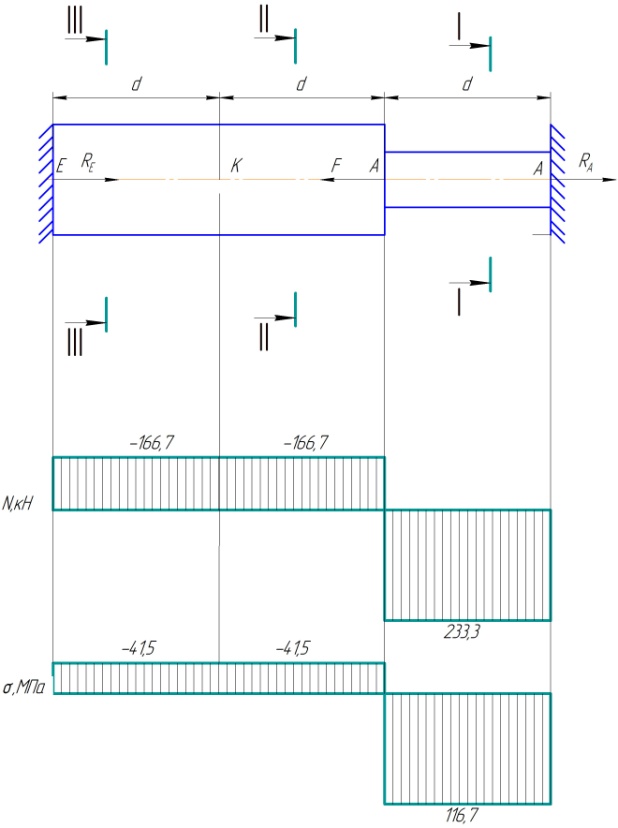
Selleks on vaja konstruktsioon jagada sektsioonideks, mille piirideks saavad kohad, kus koormust rakendatakse või ristlõikepindala muutub. Lisaks, kasutades tahke keha tasakaalu valemeid, määrame sektsioonide piiridel sisejõudude väärtused ja ristlõikepindala arvesse võttes ka sisepinged.
Vastavalt saadud andmetele koostame graafikud - diagrammid, võttes graafiku teljeks struktuuri sümmeetriatelje.
Väändeprobleemid on sarnased paindeprobleemidega, välja arvatud see, et tõmbejõudude asemel rakendatakse kehale pöördemomente. Seda silmas pidades on vaja korrata arvutuse etappe - osadeks jaotamine, keerdmismomentide ja -nurkade määramine ning joonistamine.
Paindeülesannetes on vaja arvutada ja määrata koormatud tala põikjõud ja paindemomendid.
Esiteks määratakse kindlaks nende tugede reaktsioonid, milles tala on fikseeritud. Selleks tuleb üles kirjutada struktuuri tasakaaluvõrrandid, võttes arvesse kõiki mõjuvaid jõude.
Pärast seda jagatakse tala sektsioonideks, mille piirid on välisjõudude rakenduspunktid. Arvestades iga sektsiooni tasakaalu eraldi, määratakse ristsuunalised jõud ja paindemomendid sektsioonide piiridel. Saadud andmete põhjal rajatakse krundid.
Ristlõike tugevuskatse tehakse järgmiselt:
- Määratakse kindlaks ohtliku lõigu asukoht – lõik, kus hakkavad mõjuma suurimad paindemomendid.
- Tugevuse tingimusest painutamisel määratakse tala ristlõike takistusmoment.
- Määratakse iseloomulik sektsiooni suurus - läbimõõt, külje pikkus või profiili number.
Kolmas osa. Masinaosad
Jaotises "Masina üksikasjad" on ühendatud kõik reaalsetes tingimustes töötavate mehhanismide arvutamise ülesanded - see võib olla konveieri ajam või hammasratas. Ülesannet hõlbustab oluliselt see, et kõik valemid ja arvutusmeetodid on teatmeteostes ära toodud ning õpilasel tuleb valida vaid need, mis antud mehhanismile sobivad.
Kirjandus
- Teoreetiline mehaanika: Juhend ja kontrollülesanded kõrgkoolide inseneri-, ehitus-, transpordi-, instrumentide valmistamise erialade osakoormusega üliõpilastele / Toim. prof. S.M. Targa, - M .: Kõrgkool, 1989. Neljas trükk;
- A. V. Darkov, G. S. Shpiro. "Materjalide tugevus";
- Chernavsky S.A. Masinaosade kursuse projekteerimine: Proc. käsiraamat tehnikakoolide masinaehituse erialade õpilastele / S. A. Tšernavski, K. N. Bokov, I. M. Tšernin jt - 2. väljaanne, parandatud. ja täiendav - M. Mashinostroenie, 1988. - 416 lk.: ill.
Tehnilise mehaanika lahendus tellimisel
Meie ettevõte pakub ka teenuseid mehaanika probleemide lahendamiseks ja testimiseks. Kui teil on selle teema mõistmisega raskusi, võite alati tellida meilt üksikasjaliku lahenduse. Võtame endale rasked ülesanded!
võib olla tasuta.
Antakse ülesanded arveldus-analüütiliste ja asustus-graafiliste tööde tegemiseks kõikidel tehnilise mehaanika kursuse lõikudel. Iga ülesanne sisaldab ülesannete lahendamise kirjeldust koos lühikeste juhistega, tuuakse lahendusnäiteid. Lisad sisaldavad vajalikku võrdlusmaterjali. Kutsekeskkoolide ehituserialade õpilastele.
Ideaalsete sidemete reaktsioonide määramine analüütiliselt.
1. Märkige punkt, mille tasakaalu vaadeldakse. Ülesannetes jaoks iseseisev töö selline punkt on keha raskuskese või kõigi varraste ja keermete lõikepunkt.
2. Rakendage vaadeldavale punktile aktiivsed jõud. Iseseisva töö ülesannetes on aktiivjõududeks keha enda raskus või koormuse raskus, mis on suunatud allapoole (õigemini maa raskuskeskme poole). Ploki juuresolekul mõjub koormuse kaal piki keerme vaadeldavale punktile. Selle jõu suund määratakse jooniselt. Kehakaalu tähistatakse tavaliselt tähega G.
3. Loobu seostest vaimselt, asendades nende tegevuse seoste reaktsioonidega. Kavandatud ülesannetes kasutatakse kolme tüüpi sidemeid - ideaaljuhul sile tasapind, ideaaljuhul jäigad sirged vardad ja ideaalis painduvad niidid - edaspidi vastavalt tasapinnaks, vardaks ja keermeks.
SISUKORD
Eessõna
Jagu I. Iseseisev ja kontrolltöö
Peatükk 1. Teoreetiline mehaanika. Staatika
1.1. Ideaalsete sidemete reaktsioonide analüütiline määramine
1.2. Tala toetusreaktsioonide määramine kahel toel vertikaalsete koormuste mõjul
1.3. Lõigu raskuskeskme asukoha määramine
Peatükk 2. Materjalide tugevus
2.1. Varraste sektsioonide valik tugevuse alusel
2.2. Lõigu peamiste kesksete inertsimomentide määramine
2.3. Nihkejõudude ja paindemomentide joonistamine lihtsa tala jaoks
2.4. Keskmise survejõu lubatud väärtuse määramine
3. peatükk
3.1. Lihtsaima üheahelalise raami sisejõudude diagrammide koostamine
3.2. Jõude graafiline määramine sõrestikuvarrastes Maxwell-Cremona diagrammi koostamise teel
3.3. Lineaarsete liikumiste määramine lihtsamates konsoolraamides
3.4. Staatiliselt määramatu (pideva) kiire arvutamine kolme momendi võrrandi järgi
II jaotis. Arveldus- ja graafikatööd
Peatükk 4. Teoreetiline mehaanika. Staatika
4.1. Lihtsaima konsoolsõrestiku varraste jõudude määramine
4.2. Tala toetusreaktsioonide määramine kahel toel
4.3. Lõigu raskuskeskme asukoha määramine
5. peatükk
5.1. Staatiliselt määramatu süsteemi varraste jõudude määramine
5.2. Lõigu peamiste inertsimomentide määramine
5.3. Tala lõike valimine valtsitud I-talast
5.4. Tsentraalselt kokkusurutud komposiitriiuli sektsiooni valik
Peatükk 6
6.1. Jõude määramine kolme hingega kaare lõikudes
6.2. Tasapinnalise sõrestiku varraste jõudude graafiline määramine Maxwelli diagrammi konstrueerimise teel - Cremona
6.3. Staatiliselt määramatu kaadri arvutamine
6.4. Pideva kiire arvutamine kolme momendi võrrandi järgi
Rakendused
Bibliograafia.
Laadige mugavas vormingus tasuta alla e-raamat, vaadake ja lugege:
Laadige alla raamat Tehnilise mehaanika probleemide kogumik, Setkov VI, 2003 - fileskachat.com, kiire ja tasuta allalaadimine.
Laadige alla pdf
Allpool saate osta seda raamatut parima soodushinnaga koos kohaletoimetamisega kogu Venemaal.